Evolutionary Driving Simulator
2D simulation environment using evolutionary neural networks to train autonomous driving agents without backpropagation.

ML Engineer
Built a simulation framework for training neural networks with genetic algorithms and real-time visualization.
This project explores training neural networks without gradient-based methods by using evolutionary algorithms, providing a deeper understanding of learning beyond standard backpropagation. By removing reliance on differentiability, the approach enables experimentation in environments where gradients are unavailable or difficult to define.
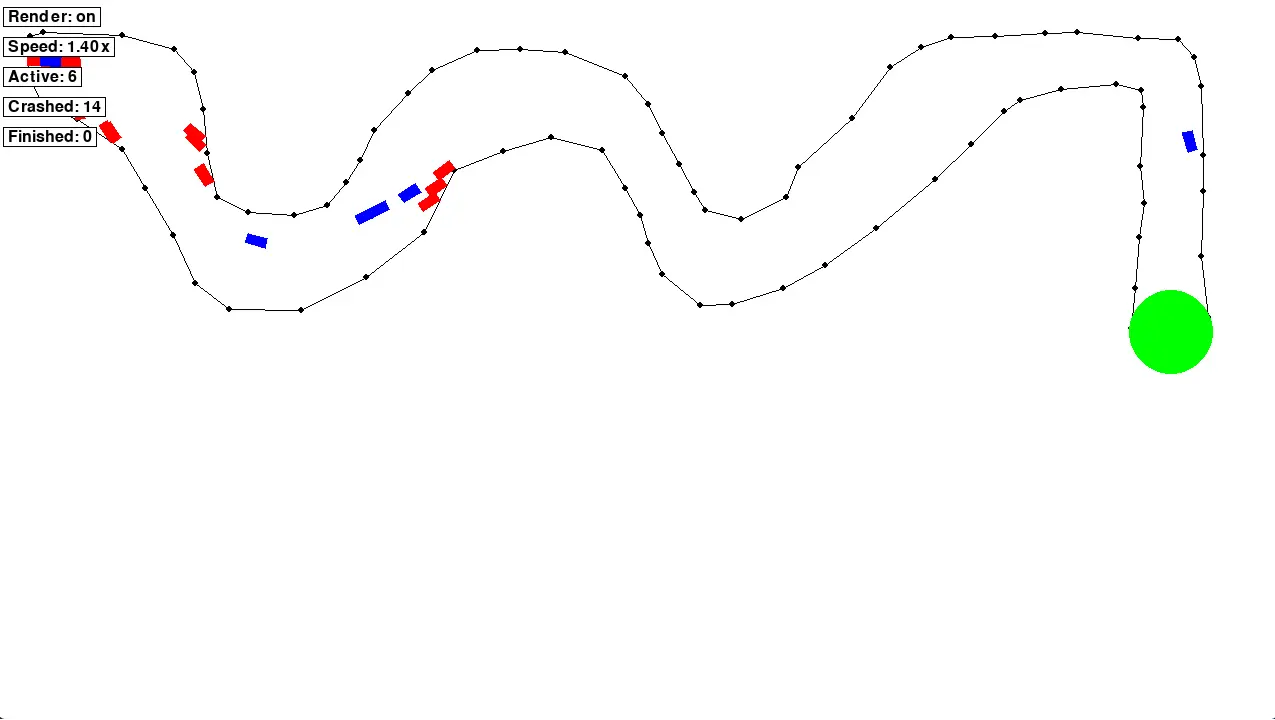
The system is a 2D top-down driving simulator where agents navigate custom tracks using sensor inputs. Neural network weights are evolved using a genetic algorithm, with each generation evaluated based on driving performance and improved through selection and mutation.
The architecture cleanly separates simulation, evolution, and visualization. A custom map editor allows rapid environment design, while a real-time viewer enables observation and analysis of agent behavior during training.
To improve generalization, a retention-based training strategy was implemented across multiple tracks, encouraging agents to retain useful behaviors instead of overfitting to a single environment.
Key Features
- Genetic algorithm training for neural network controllers
- Multi-track retention strategy for improved generalization
- Real-time visualization of agent behavior and training
- Interactive map editor for rapid experimentation
This project demonstrates a strong understanding of machine learning fundamentals, including neural network representation, optimization strategies, and system design for experimentation.
Gallery
Contribution
Designed and implemented the full simulation environment, neural network representation, and genetic training pipeline, including a custom map editor and real-time visualization system.